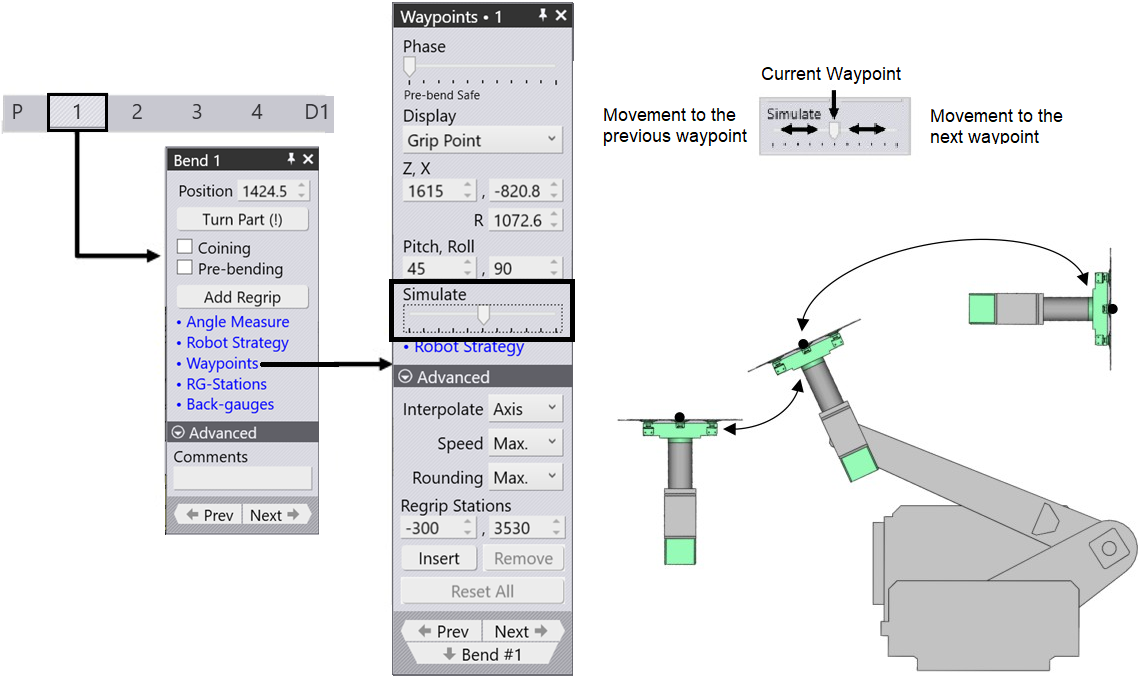
Simulate Waypoints
To control the movement, the path to the currently selected waypoint and to the next waypoint can be simulated.
Procedure:
-
Select the Bending situation with the desired waypoint.
-
Simulate the robot movement using the scroll bar.