Adapt WayPoints
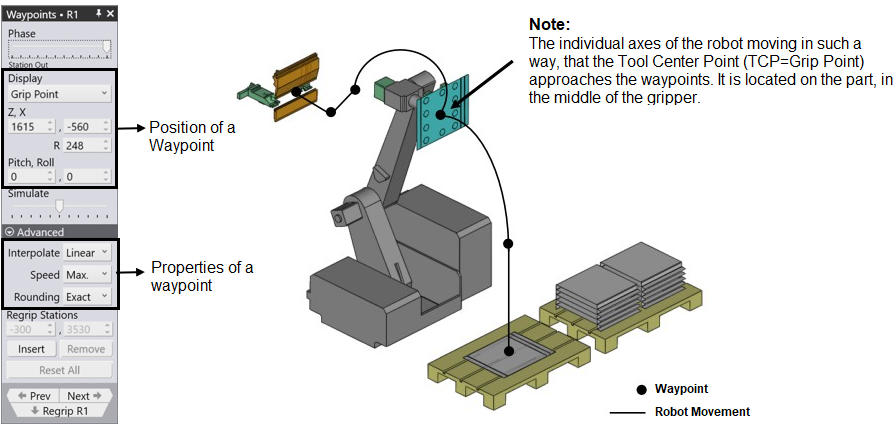
Waypoints can be accessed with this waypoints panel as shown below:

-
Use the Display panel to view the gripper point, or the wrist point (or to edit the actual axes directly).
-
The position and angle of the wrist or gripper are displayed and can be edited. If the Axis mode is selected, the robot axes values are displayed and can be edited.
-
The yellow trace shows the path from the previous step to this one, and from this step to the next one (see image alongside). The 3 small triangles drawn indicate the local X and Y coordinates of the robot (wrist or gripper).
-
The Simulate slider is used to move the simulation from the previous step to the next step. If this is in the middle, that is the actual step we are editing.
-
The Interpolate setting is used to switch between linear and axis-oriented interpolations.
-
The Speed and Rounding settings are used to edit the speed and accuracy setting for this step.
-
Use the Prev and Next buttons to go to the next or previous steps (or you can also use the Left and Right arrow keys).