Methods of Regripping
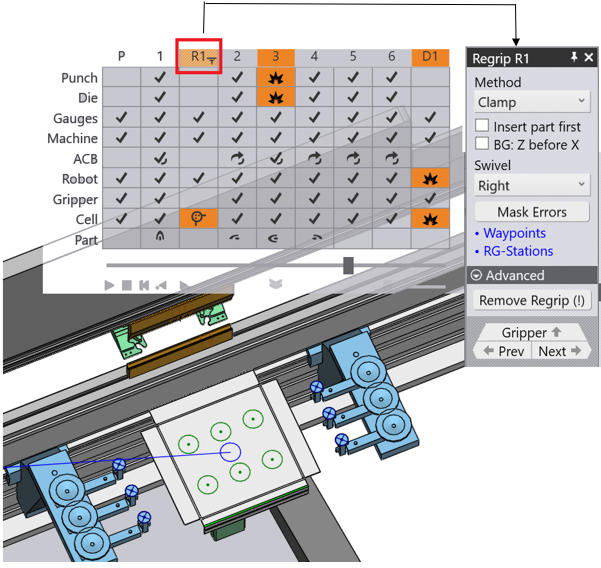
There are various settings used to control the regripping process.
-
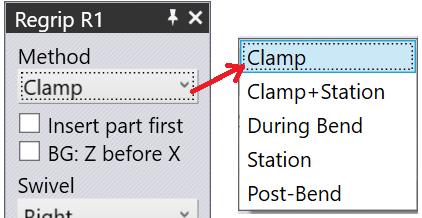
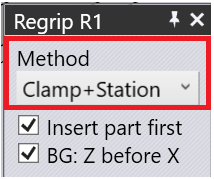
Use the Method option to pick the method to process regripping.
-
Clamp,
-
Clamp+Station,
-
During Bend,
-
Station,
-
Post Bend.
-
-
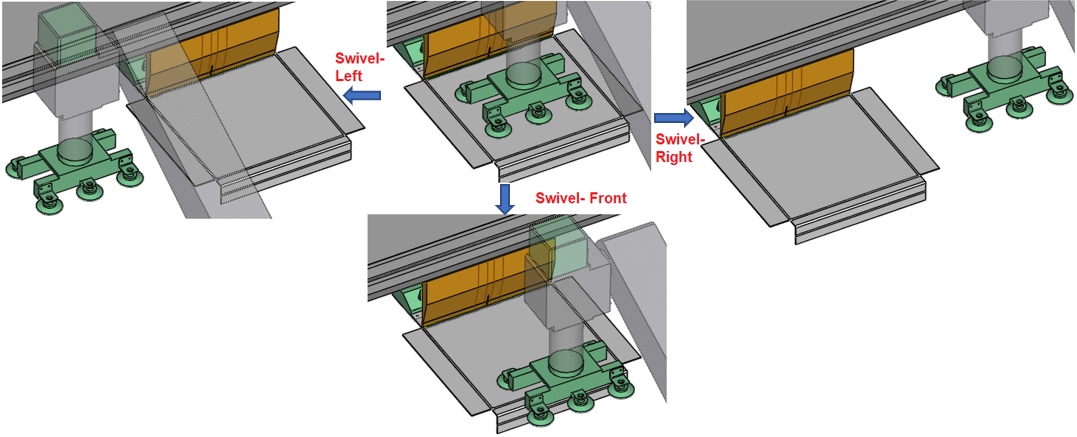
Swivel option helps in the direction of the Gripper around the part during the Re-gripping process.
-
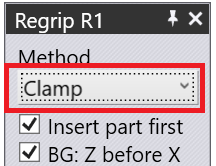
The Insert part first option is already discussed during insertion strategy. The similar way is used here.
-
BG: Z before X option is already discussed during insertion strategy. The similar way is used here.
Clamp Method
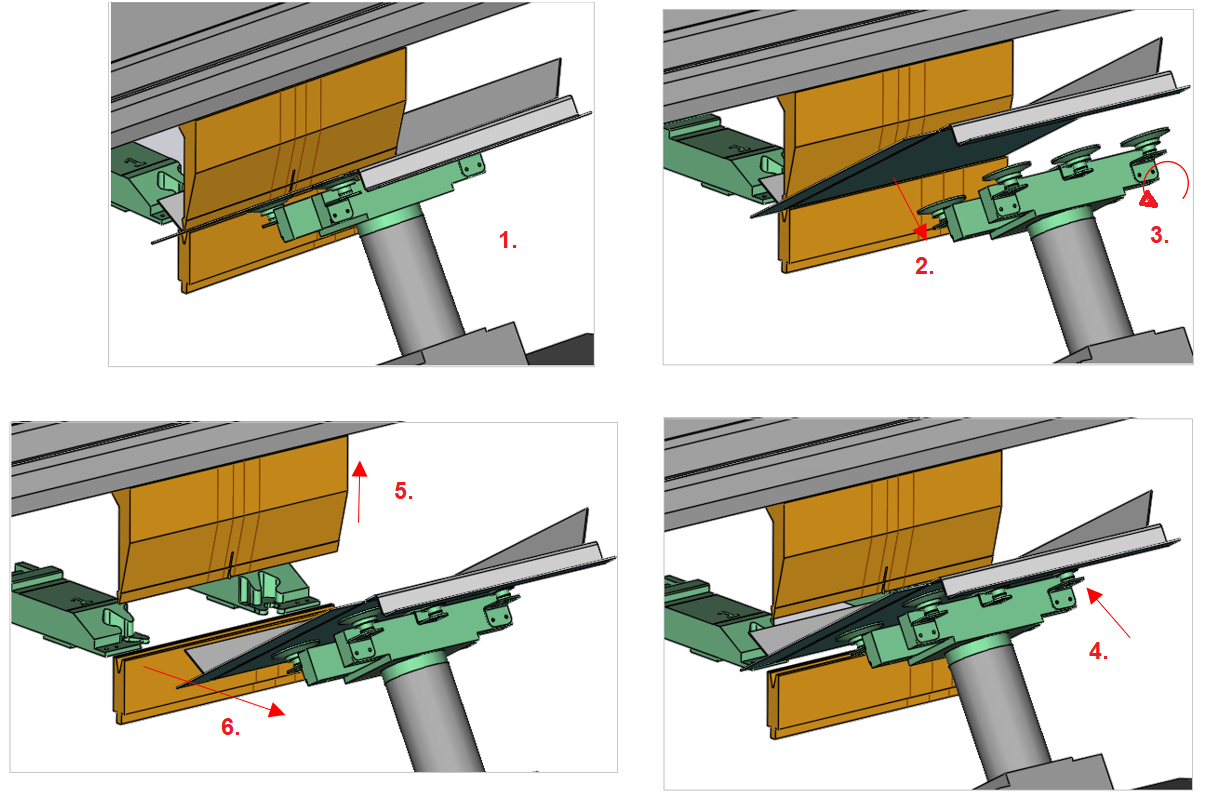
When you select the the Clamp method, the Gripper will use the Bend Tool to hold the part and complete the swivel sequence and re-grips from the other side of the part.
You can see below a typical route that Flux RoboBend computes to take the gripper around to the other side.
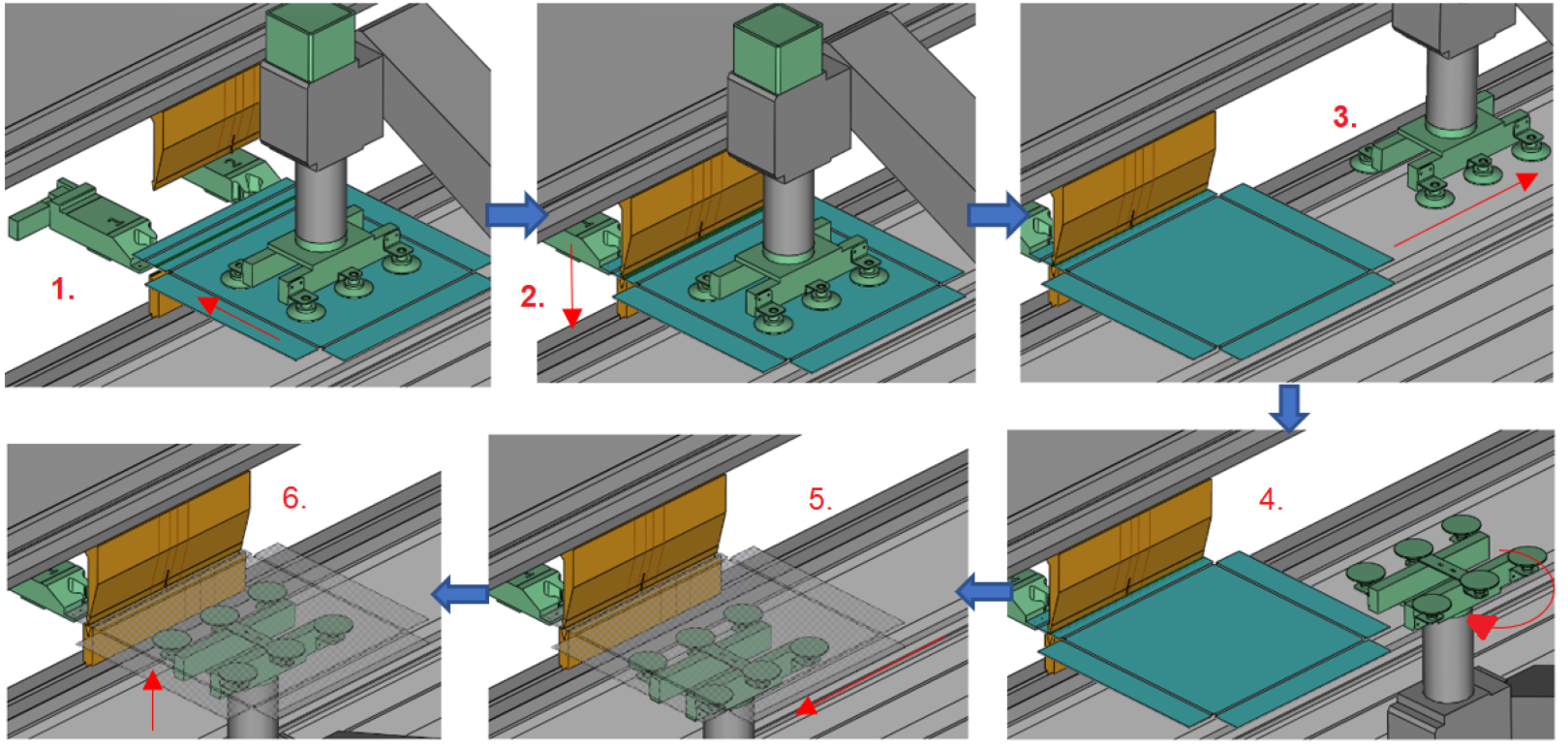
1. Gripper moves in towards the bend position.
2. Part kept now in the Clamping position with Tool.
3. Gripper Retract and swivel towards the Left side while the part in Clamping position (Swivel- Left).
4. Gripper takes the Trajectory with the help of Robot to turn upside down.
5. Gripper comes in contact under the part.
6. Re-Gripping completes the cycle with the CLAMP method.
Clamp + Station Method
When you select the the Clamp+Station method, the Re-Gripping happens at the clamping point but also the Regrip Stations supporting the part.
You can see below a typical route that Flux computes to take the gripper around to the other side.
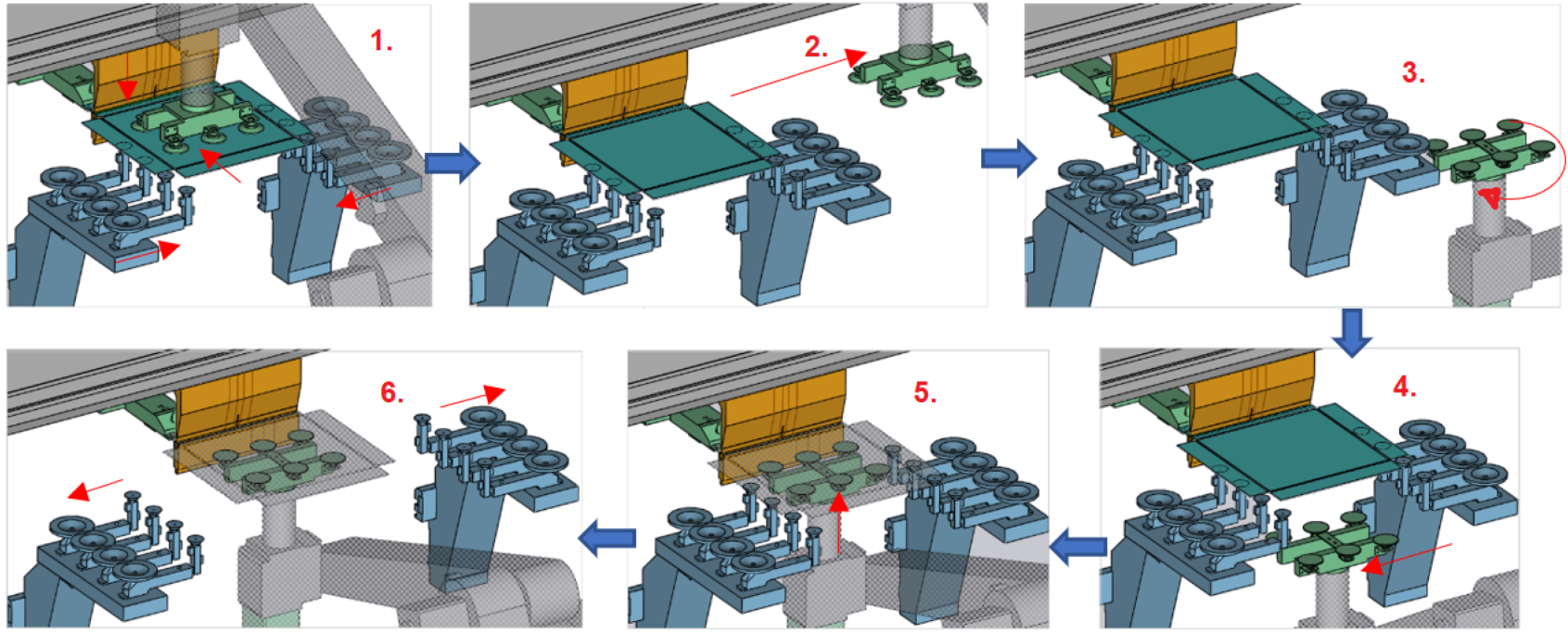
1. Gripper moves in towards the bend position under the tool also the Re-gripping stations comes to hold the part from bottom and Bend Tool comes down with Part in Clamping position with Tool.
2. Gripper Retract and Swivel towards the Left side while the part in Clamping position (Swivel- Left).
3. Gripper takes the Trajectory with the help of Robot to turn upside down.
4. Gripper comes in contact under the part.
5. Re-Gripping Stations moves out from the gripping position and this completes the cycle with the Clamp-Station method.
During Bend Method
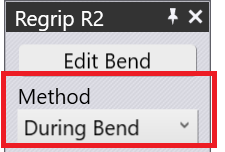
When you select the During Bend method, the Re-Gripping happens at the clamping point during the Bending process without Regrip-Stations.
You can see below a typical route that Flux computes to take the gripper around to the other side

1. Gripper moves in towards the bend position. & Part kept now in the Clamping position with Tool.
2. Gripper Retract and swivel towards the Left side while the part in Clamping position (Swivel- Left).
3. Gripper takes the Trajectory with the help of Robot to turn upside down.
4. At same time Bend Process completes.
5. Gripper comes in contact under the part.
6. Tool moves Up after Gripper in contact.
7. Part now retracts and Re-Gripping completes the cycle with the During Bend method
Station Method
When you select the the Station method, the Re-Gripping happens with the Regrip Stations supporting the part.
You can see below a typical route that Flux RoboBend computes to take the gripper around to the other side.

1. Gripper moves in and also the Re-gripping stations comes to hold the part from bottom.
2. Gripper Retract and Swivel towards the Left side while the part in Clamping position (Swivel- Left).
3. Gripper takes the Trajectory with the help of Robot to turn upside down.
4. Gripper comes in contact under the part.
5. Re-Gripping Stations moves out from the gripping position and this completes the cycle with the Station method.
Post-Bend Method
When you select the the Post-Bend method, the Re-Gripping happens after the Bending process with the part still at the clamping point.
You can see below a typical route that Flux RoboBend computes to take the gripper around to the other side
1. Bending Process completes with the Part kept under the Clamping position with Tool.
2. Gripper Retract and swivel towards the Front side while the part in Clamping position (Swivel- Front).
3. Gripper takes the Trajectory with the help of Robot to rotate to the required position.
4. Gripper comes in contact under the part.
5. Tool moves up after Gripper in contact.
6. Part now retracts and Re-Gripping completes the cycle with the Post-Bend method.
Swivel Option
Swivel option helps in the direction of the Gripper around the part during the Re-gripping process. With the three options of swivel, we can make the Re-gripping sequence for the movement of the gripper.
-
Front
-
Left
-
Right